仿生工位:采用人工智能的人机协作
Date: 2018-04-17在工业变革中出现了新的要求,如产品生命周期缩短、但派生品种却大大增加。同时,确保员工能快速、直观地适应新工作,变得越来越重要。这就需要人、机械与软件之间实现新形式的协作。这里具有人工智能的自我学习系统与基于机器人的自动化解决方案发挥了重要作用。基于机器人的解决方案与人类操作员手把手协作,互相形成网络。仿生工位满足了所有这些要求 – Festo 在2018汉诺威工业博览会上展出突破性的工作环境。
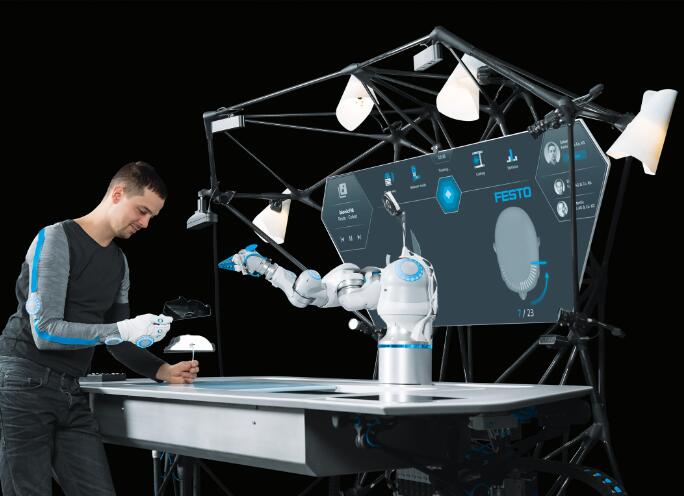
仿生工位:: 人与仿生机械臂一起工作,并配备了许多相互连接、相互通信的辅助系统与外围设备
未来,生产将是柔性的 – 无论是从制造的产品角度,还是从工位和工作环境设计角度。人工智能与机器学习将工位转变成学习系统,持续成长,优化适应实际工作要求。Festo 通过仿生工位,令人印象深刻地展示了这个特性。在仿生工位上,人与仿生机械臂一起工作,并配备了许多相互连接、相互通信的辅助系统与外围设备。通过技术让操作员减轻疲劳或从有危险的工作中解脱出来,从而为操作员的各项工作提供支持。
基于传感器与人工智能的学习系统
整个工位的设计符合人机工学,可按不同的人来调节适应,甚至包括灯光。传感器与相机系统记录操作员、元件与工具的位置,这样人就能通过手势、触摸或语音来直观地控制BionicCobot。同时,一个软件系统处理所有相机图像以及来自各种外围设备的输入信号。利用这些信息,该软件系统能衍生出最优的程序顺序。该系统从每个新动作中进行学习,从而对自身持续优化。因此,受控、编程和设定的顺序让位于更加自由的工作方式。

人通过手势、触摸或语音直观地控制BionicCobo
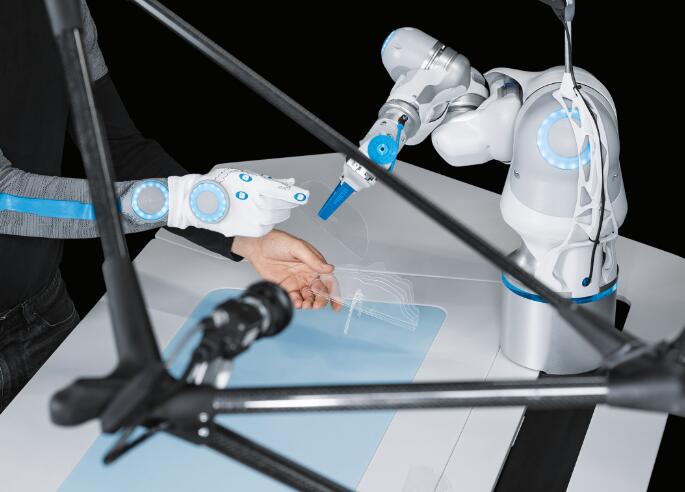
传感器与相机系统记录操作员、元件与工具的位置
分享知识,全球共享
习得知识并优化后,仿生工位的过程和技能可实时传输给同类型的其它系统,全球共享。例如,未来可将各工位集成为全球网络,从而共享知识模块;用不同的国家语言进行沟通。这样,生产不仅变得更柔性,而且更分散:操作员可从互联网平台调出生产订单,与机器协作自主生产这些订单 – 满足客户个性化的愿望与要求。工位实现远程操作也离我们不远。
BionicCobot(仿生轻型协作型机器人)作为核心元素
该工作环境的关键组成部分就是气动轻型“BionicCobot”。该机器人以人类手臂为模型。由压缩空气驱动完成各种动作,灵活性佳;因此,其可直接、安全地与人进行交互。数字化气动技术让这一切成为可能:Festo Motion Terminal(数字控制终端)与 BionicCobot 的组合开创了人机协作的全新解决方案空间,让BionicCobot 既能快速、大力地运动,也可柔性而精巧地运动。
个性化生产场景
汉诺威工业博览会上,仿生工位展示的是个性产品制造的场景。例如,为制造一个人类头部的个性化模型,激光切割机首先会将亚克力玻璃切片:一个软件程序将用智能手机扫描得到的一个人的面部特征转换成CAD模型,然后分割成一片一片。激光切割机基于这个三维模板从亚克力玻璃上切割出各个部分。BionicCobot 直接从切割机取出切片,以正确的顺序给到操作员,后者将切片组装成一个独一无二的模型。
材料的自动持续进给由Robotino® 确保,其在两个站之间自主来回行驶。上料由改进版的BionicMotionRobot 完成
在这个场景中,材料的自动持续进给由Robotino® 确保,其在两个站之间自主来回行驶,通过激光扫描器来安全地找到行驶路线。上料由改进版的BionicMotionRobot 完成,其采用了由气腔组成的软性机器人结构及三维编制织物外覆层。这个配置组合了机器人技术的所有关键元素。